EL CUATERNIÓN
ETIMOLOGÍA:
·Cuaternión proviene del latín quaterni, su significado literal es "número de cuatro componentes". Este nombre fue propuesto por su creador William Rowan Hamilton.
| |
APLICACIONES:
·Los cuaterniones en física representan rotaciones en el espacio.
·Pueden utilizarse para probar resultados como el teorema de los cuatro cuadrados dado por Lagrange.
| |
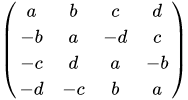
Además hay, al menos, dos formas iguales, para representar cuaterniones con matrices. Así el cuaternión
se puede representar:
Donde el conjunto de todas las matrices anteriores se designa mediante
Una propiedad interesante de esta representación es que todos los números complejos son matrices que sólo tienen componentes reales.
 | |
Matricial:
El conjunto de los cuaterniones puede expresarse como:
Entonces un cuaternión es un número donde a, b, c, y d son números reales determinados por cada cuaternión.
Análogamente, un cuaternión puede expresarse como el producto interno de dos vectores. En este caso, el elemento a1 que forma la componente real se anota aparte, y para el producto interno se consideran solamente las tres bases i, j, k:
Esta representación tiene algunas ventajas que pueden ser vistas en algunas operaciones como el producto de cuaterniones.
| |
DETALLES ALGEBRAICOS
Los cuaterniones son un ejemplo de cuerpo asimétrico. La multiplicación es asociativa y todo cuaternión no nulo posee un único inverso. Forman una -álgebra asociativa 4-dimensional sobre los reales y los complejos forman un subconjunto de ella.
El conjunto de los cuaterniones de valor absoluto 1 forman una esfera 3-dimensional y un grupo con la multiplicación. Este grupo actúa, mediante conjugación, sobre la constituida por los cuaterniones cuya parte real es cero. No es difícil comprobar que la conjugación por un cuaternión unidad de parte real.
Sea A el conjunto de cuaterniones de donde a, b, c y d son, o todos enteros o todos racionales con numerador impar y denominador 2.
| |
GENERALIZACIÓN:
Si F es un cuerpo cualquiera y a y b son elementos de F\{0}, se puede definir un álgebra asociativa unitaria de cuatro dimensiones sobre F utilizando dos generadores, i y j, y las relaciones i² = a, j² = b e ij = -ji. Estas álgebras, o son isomorfas al álgebra de matrices 2x2 sobre F, o son álgebras de división sobre F, y se denominan álgebras de cuaterniones.
|